Design Optimization of a Mechanically Constrained Re-Localizable Remote-Center-of-Motion
Abstract
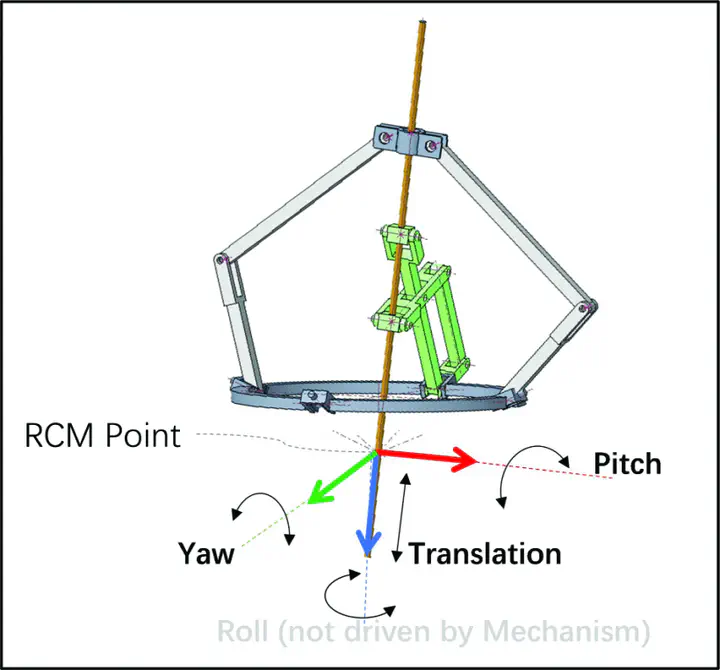
Remote-center-of-motion (RCM) mechanism is widely used in minimally invasive surgeries (MIS). Such mechanisms manipulate surgical instruments constraining the motion in compliance to the surgical incision opening. This paper presents a novel RCM mechanism, which contains a parallel manipulator and a parallelogram structure to create a re-localizable RCM point that can be generalized over a range of procedures. Based on analytical and computational evaluation, the design meets the requirement for the workspace requirement of a typical MIS with optimal design parameters for dexterity. We envision that the re-localizable RCM capability will open up great flexibility in surgical robot design while retaining the safety features of the traditional mechanical RCM.