Design-Centric Model-Based Development of a Generalized Robotic Manipulator for Anastomosis and Ophthalmic Procedures
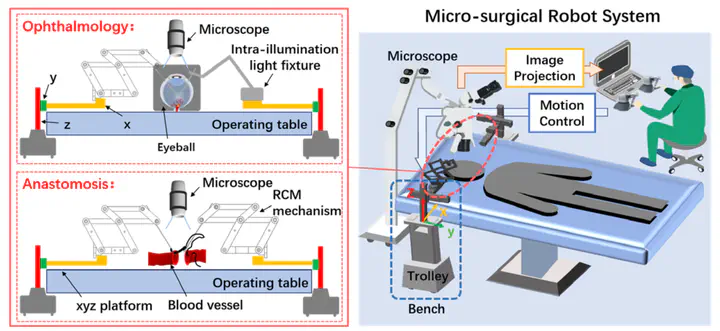 System Overview
System Overview
Abstract
Microsurgical robots are being extensively researched on to assist surgeons in improving surgical quality. With the exceptionally demanding requirements for precision, coupled with constraining operating space and inevitable hand tremors, surgical instrument manipulation during microsurgeries is challenging. Conventional designs for surgical manipulators have limited flexibility of the RCM point and inadequate versatility. This paper proposes a generalized robotic manipulator for anastomosis and ophthalmic procedures based on a parallelogram structure to mechanically constrain the RCM points. Novel features of the design include the functionality of repositionable RCM point and a quick-change mechanism. Evaluation based on computational analysis and simulation tests confirmed that the design meets the surgical requirements with good operability and safety. We believe that the repositionable RCM capability and the end-effector’s quick-change function improve flexibility and operational convenience during microsurgeries.