Variable Admittance Control with Robust Adaptive Velocity Control for Dynamic Physical Interaction between Robot, Human and Environment
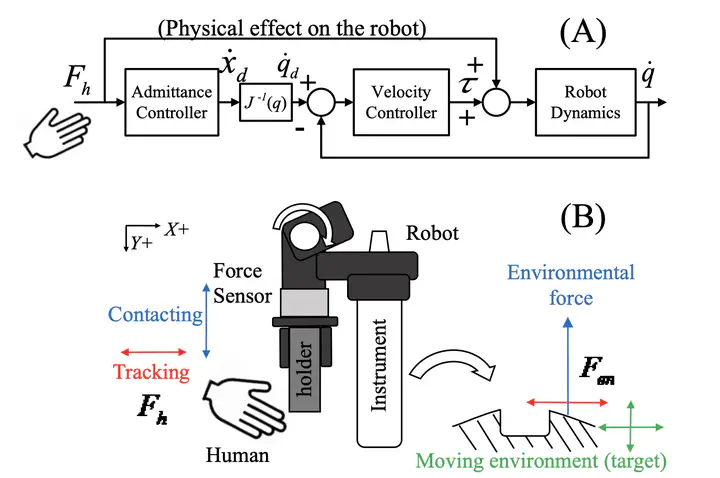 (A) Admittance control scheme for pHRI.(B) Research problems.
(A) Admittance control scheme for pHRI.(B) Research problems.
Abstract
In the field of collaborative robot whose end-effector is complaint in response to human force, the human operator is able to execute tasks based on their judgement. The advantages include human power augmentation and utilization of human’s judgement. A force/torque sensor is usually mounted on the end -effector to sense the human force, which is sent to an interaction controller to yield velocity command for the robot to follow. However, when human guides the end-effector to contact an extra dynamic environment that moves in multiple directions, it poses challenges on controller design. The interaction controller needs to provide the stable interaction for human operator to contact such a dynamic contact force (due to the moving environment) while to provide compliant cooperation for the human to follow the motion of the environment. To address these issues, we propose variable admittance control based on robust adaptive velocity control. The human and environmental forces are considered in the variable admittance controller to obtain the suitable interaction between robot, human, and environment. Additionally, robust adaptive control is employed to enhance the tracking performance. Experiments are conducted and the results show the proposed controller enables the human operator to stably contact a dynamic environment and compliantly track the motion of it.