Application of Compliant control in Pin-Based Shape Display for Compliant Physical Interaction between Human and Machine
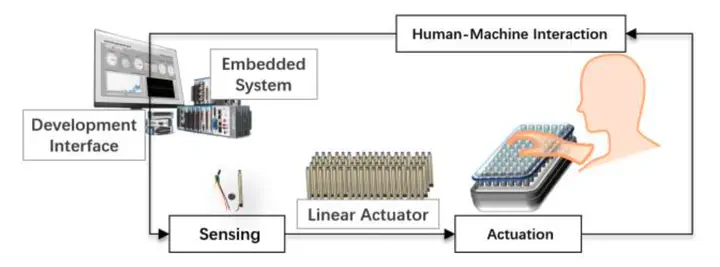 System Structure
System Structure
Abstract
Compliant control is widely used in the human- robot interaction (HRI) field. However, very few research pays attention on applying compliant control to the pin-based shaped display which is a type of HRI device widely researched as tangible user interface for the enhancement of the HRI quality. Admittance control as one of the compliant controls is performing well under soft environment which is ideal as a candidate control method for pin-based shape display for the reason that the human body surface is generally soft. In this paper, a pin-based shape display with admittance control will be prototyped. The general control scheme as well as the design methodology will be explained and evaluated. A variable compliant control will be proposed and simulated to achieve even normal force distribution on its surface. Different compliant control parameters will be chosen to evaluate the device under experiment.
This conference paper haven’t been published online yet, you can find the PDF file here.