Virtual Potential Field-Based Motion Planning for Human-Robot Collaboration via Kinesthetically Guided Teleoperation
 Virtual Potential Field
Virtual Potential Field
Abstract
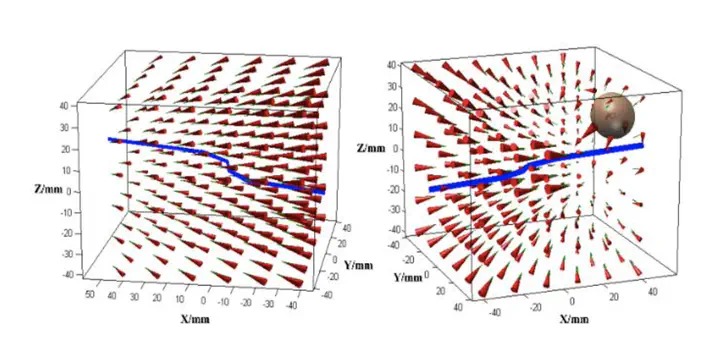
Driven by the evolving role of modern robots in collaboration with human operators, this paper proposes a virtual potential field-based motion planning and control strategy to realize effective human-robot collaboration through kinesthetic guidance via robot teleoperation. The motion of the teleoperated robot is determined by the human operator using a haptic device programmed to replicate movement under the influence of the virtual potential field constructed based on the obstacles and objectives in the environment. This approach facilitates seamless cooperation between the human and collaborative robot. It can also be readily generalized to include moving obstacles and goals in a dynamic environment. The results suggest that the virtual potential field can effectively enhance the safety and accuracy of human-robot cooperation. The developed method has promising applications in human-centric robotics fields such as medical robotics and robot-assisted surgeries.