Advanced Robotics (2022 Fall)
Robotics Course for undergrad and grad students
General Description
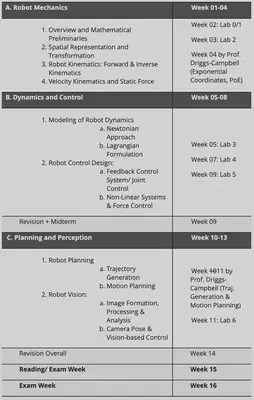
This course is structured into three segments: A) Robot Mechanics, B) Dynamics & Control C) Planning & Perception. First, learners will be familiarized with the fundamentals relevant to the course, namely, homogeneous transformations, forward and inverse kinematics, velocity kinematics and eventually acquainted to the essentials including robot dynamics and controls. Finally, applied topics related to robot planning and perception covering path and motion planning, image formation, processing and analysis, vision-based control and image-guided robotics will be introduced to learners relating the fundamentals and essentials acquired in the earlier part of the course
Course Objective
The goal of this course is to introduce students to the basic concepts in robotics that
- provide prerequisite knowledge for follow-on courses,
- (b) provide essential knowledge of the field that would be required by a practicing engineer who must deal with automation, and
- (c) provides professional development by introducing best practices and ethical considerations for engineering design.
This course also includes a significant laboratory component.
Lecture Information
Instructors
Katie Driggs-Campbell, Liangjing Yang(liangjingyang@intl.zju.edu.cn)
Lead TA
Lead TA:Songjie Xiao
Lectures
Mon and Wed, 8-920 am (West Hall C105/111)
Lab
See lab grouping, E205
Consultation Hour
- Tues 1830-2000 (Even Wk)
- Thurs 1530-1700 (Odd Wk);
- @E205 Instructional Control Lab (Welcome also to arrange a time with us)
Prerequisite
One of MATH 225, MATH 286, MATH 415, MATH 418
Reference Textbook
- John J. Craig, Introduction to Robotics: Mechanics and Control (4th Edition), Pearson, 2018. ISBN-10: 0133489795
- Lynch & Park, Modern Robotics: Mechanics, Planning and Control (1st Edition), Cambridge University Press, 2017. ISBN-10: 1107156300
- Peter Corke, Robotics, vision and control: fundamental algorithms in MATLAB® (2nd Edition), Springer, 2017. ISBN-10: 3319544128
Assesment
- Homework: 20%
- Labs/Projects: 20%
- Midterm: 20%
- Final: 40%
Overview of Course Schedule